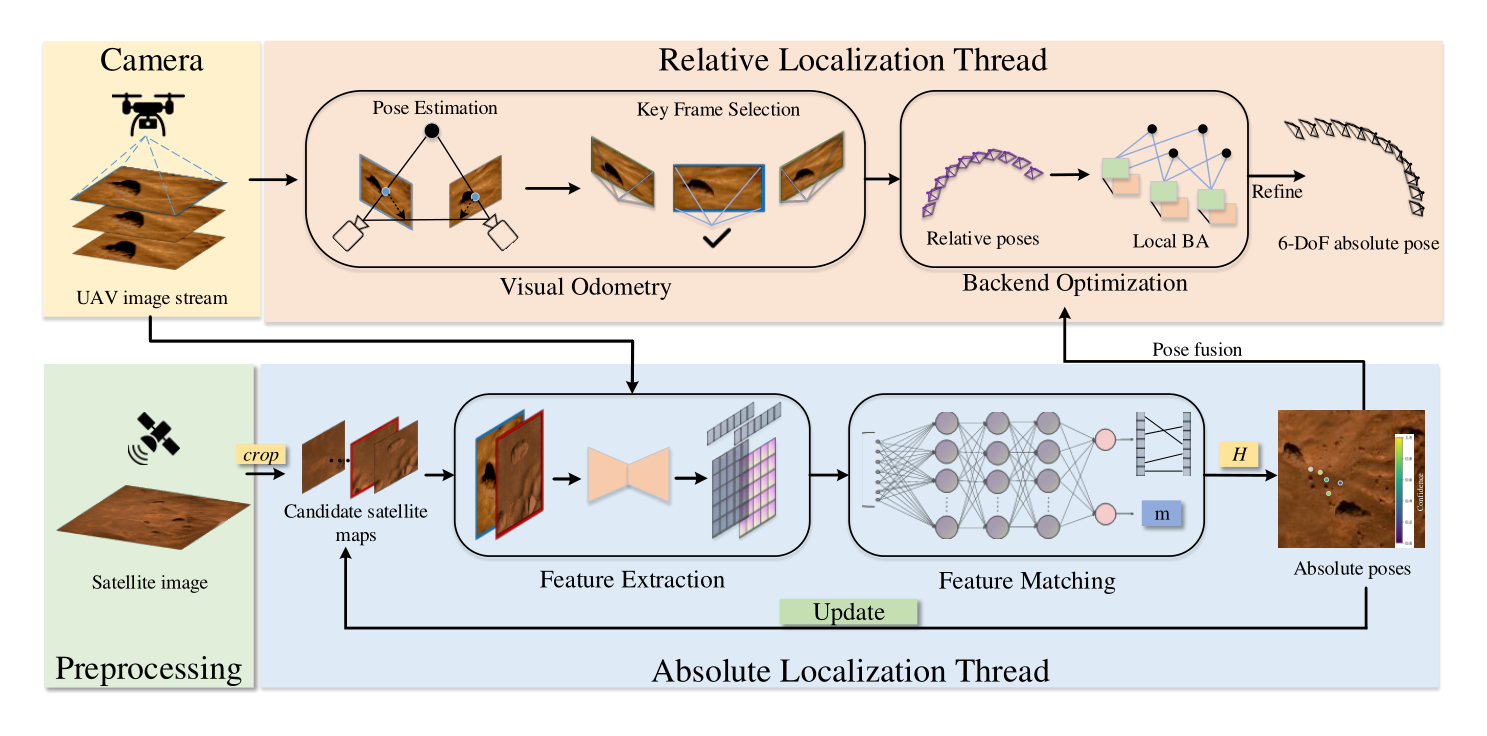
Pipeline of the proposed JointLoc framework.
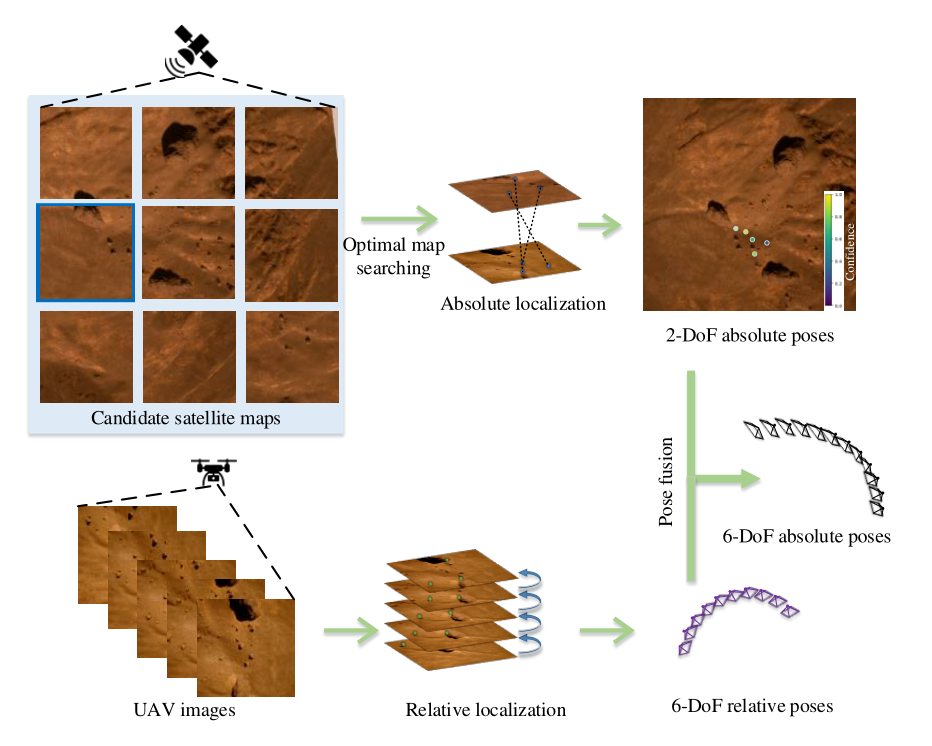
Brief overview of the proposed JointLoc framework.
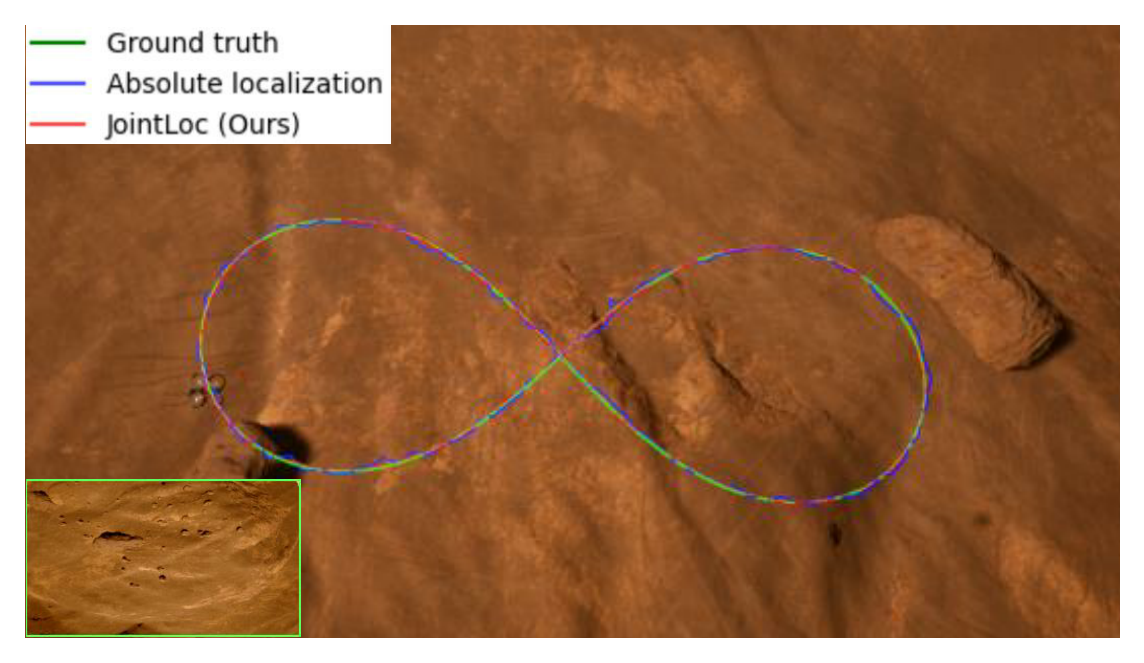
Unmanned aerial vehicles (UAVs) visual localization in planetary aims to estimate the absolute pose of the UAV in the world coordinate system through satellite maps and images captured by on-board cameras. However, since planetary scenes often lack significant landmarks and there are modal differences between satellite maps and UAV images, the accuracy and real-time performance of UAV positioning will be reduced. In order to accurately determine the position of the UAV in a planetary scene in the absence of the global navigation satellite system (GNSS), this paper proposes JointLoc, which estimates the real-time UAV position in the world coordinate system by adaptively fusing the absolute 2-degree-of-freedom (2-DoF) pose and the relative 6-degree-of-freedom (6-DoF) pose. Extensive comparative experiments were conducted on a proposed planetary UAV image cross-modal localization dataset, which contains three types of typical Martian topography generated via a simulation engine as well as real Martian UAV images from the Ingenuity helicopter. JointLoc achieved a root-mean-square error of 0.237m in the trajectories of up to 1,000m, compared to 0.594m and 0.557m for ORB-SLAM2 and ORB-SLAM3 respectively. The source code will be available at https://github.com/LuoXubo/JointLoc.
@INPROCEEDINGS{10137193,
author={Luo, Xubo and Wan, Xue and Gao, Yixing and Tian, Yaolin and Zhang, Wei and Shu, Leizheng},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={JointLoc: A Real-time Visual Localization Framework for Planetary UAVs Based on Joint Relative and Absolute Pose Estimation},},
year={2024},
volume={},
number={},
pages={102-106},
keywords={Location awareness;Deep learning;Satellites;Service robots;Image matching;Refining;Lighting;deep learning;image matching;geo-localization;autonomous drone navigation},
doi={10.1109/ICoSR57188.2022.00028}}